Enhancing Blind Visitor's Autonomy in a Science Museum Using an Autonomous Navigation Robot
30-sec Preview Video
Main Video [1:16]
Abstract
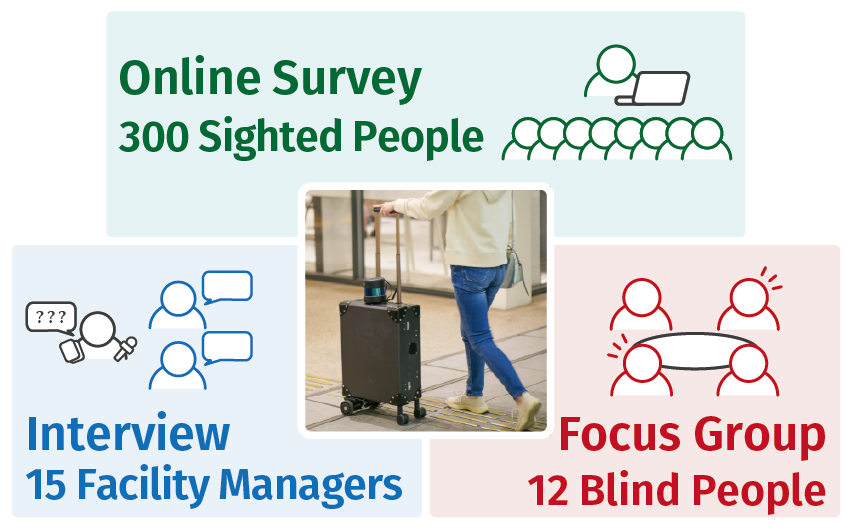
Enabling blind visitors to explore museum floors while feeling the facility's atmosphere and increasing their autonomy and enjoyment are imperative for giving them a high-quality museum experience. We designed a science museum exploration system for blind visitors using an autonomous navigation robot. Blind users can control the robot to navigate them toward desired exhibits while playing short audio descriptions along the route. They can also browse detailed explanations on their smartphones and call museum staff if interactive support is needed. Our real-world user study at a science museum during its opening hour revealed that blind participants could explore the museum safely and independently at their own pace. The study also showed that the sighted visitors who saw the participants walking with the robot accepted the assistive robot well. We finally conducted focus group sessions with the blind participants and discussed further requirements toward a more independent museum experience.
Publication
Seita Kayukawa, Daisuke Sato, Masayuki Murata, Tatsuya Ishihara, Hironobu Takagi, Shigeo Morishima, and Chieko Asakawa.
2023.
Enhancing Blind Visitor's Autonomy in a Science Museum Using an Autonomous Navigation Robot.
In Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems (CHI 2023).
Authors
IBM Research
Waseda Research Institute for Science and Engineering
Related Project

Other Links



Acknowledgements
We thank the Miraikan - The National Museum of Emerging Science and Innovation, Science Communicators, and all study participants. This work was supported by JST-Mirai Program (JPMJMI19B2) and JSPS KAKENHI (JP20J23018).