Beyond Omakase: Designing Shared Control for Navigation Robots with Blind People
Abstract
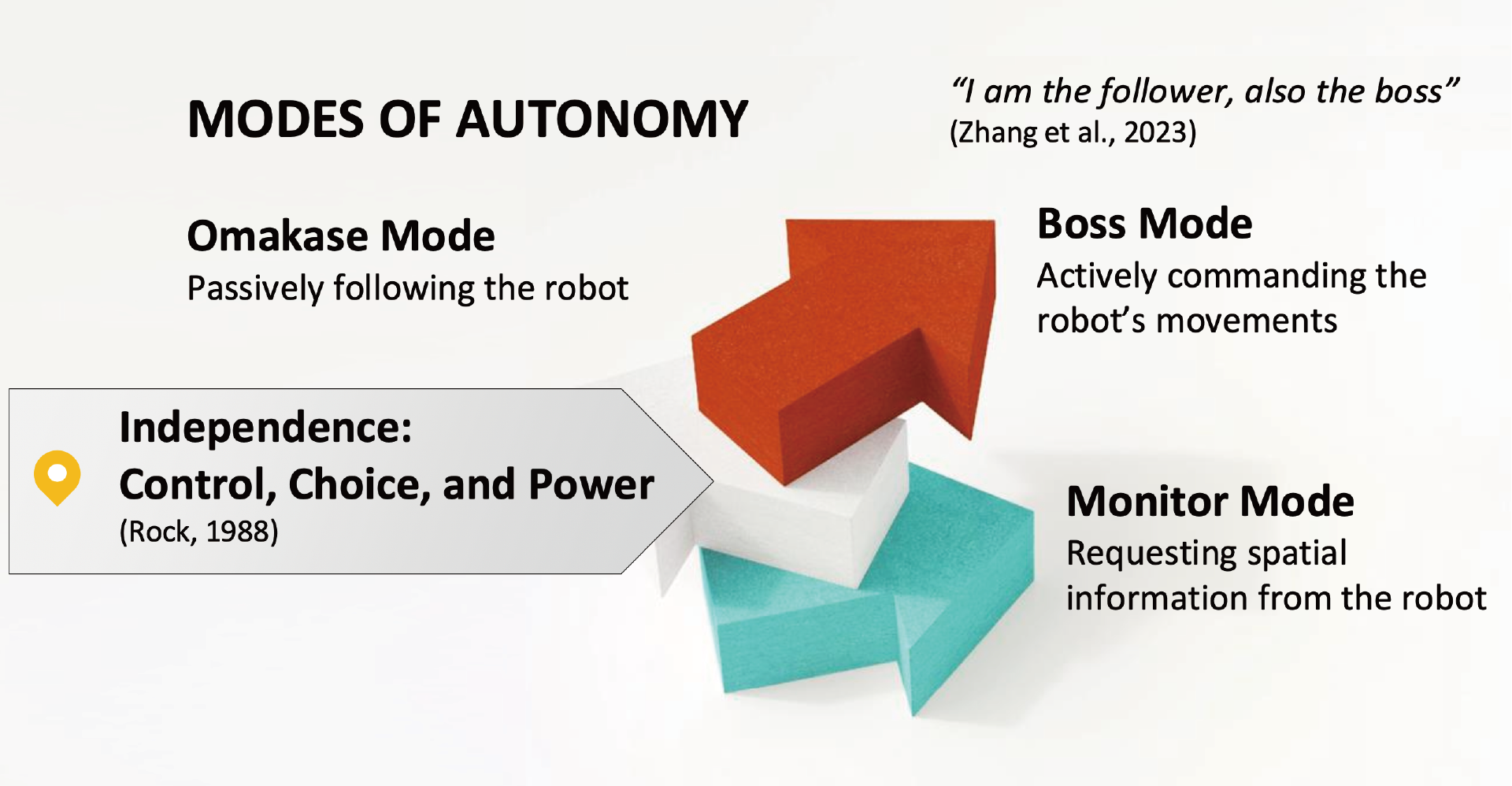
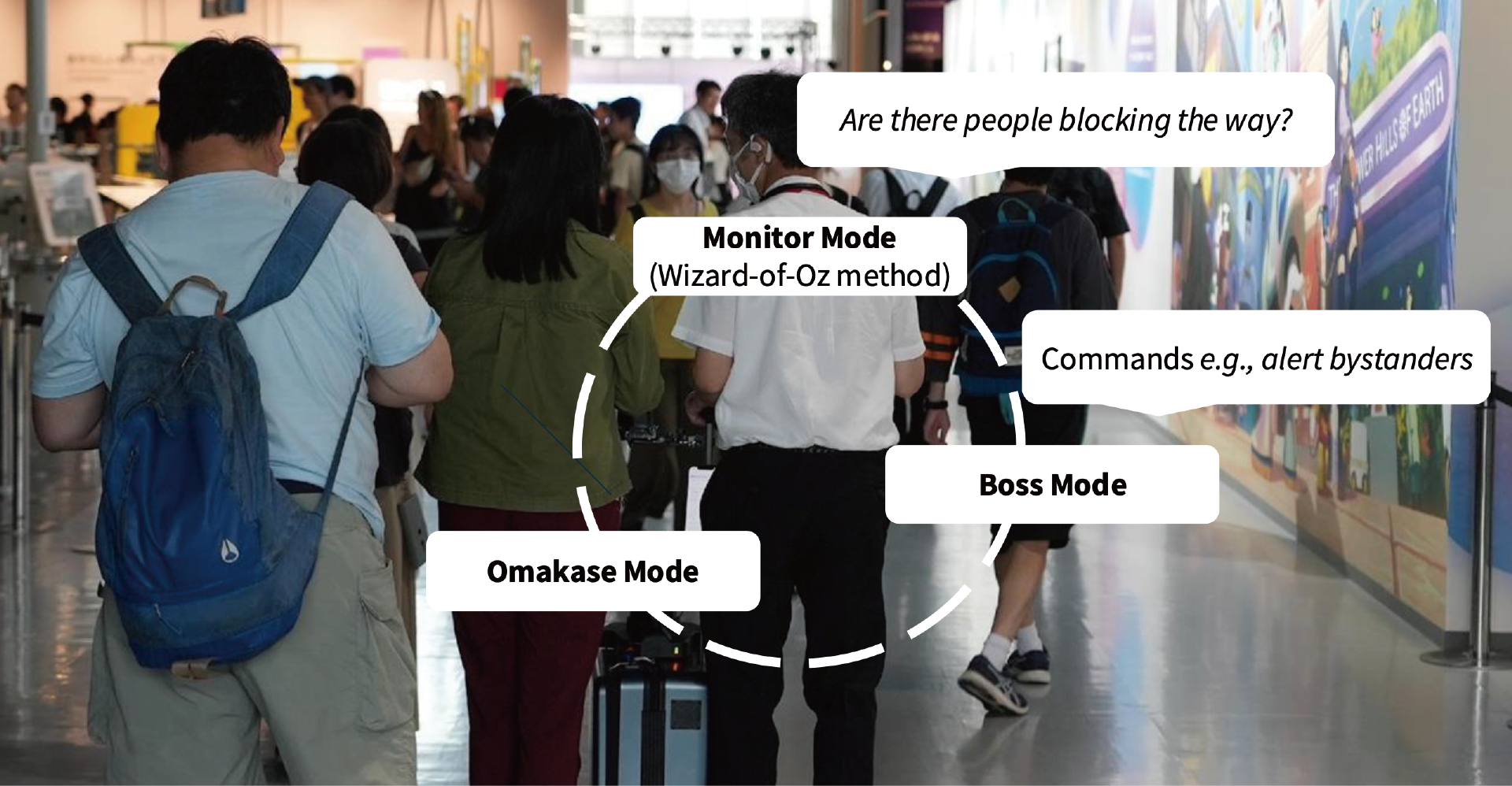
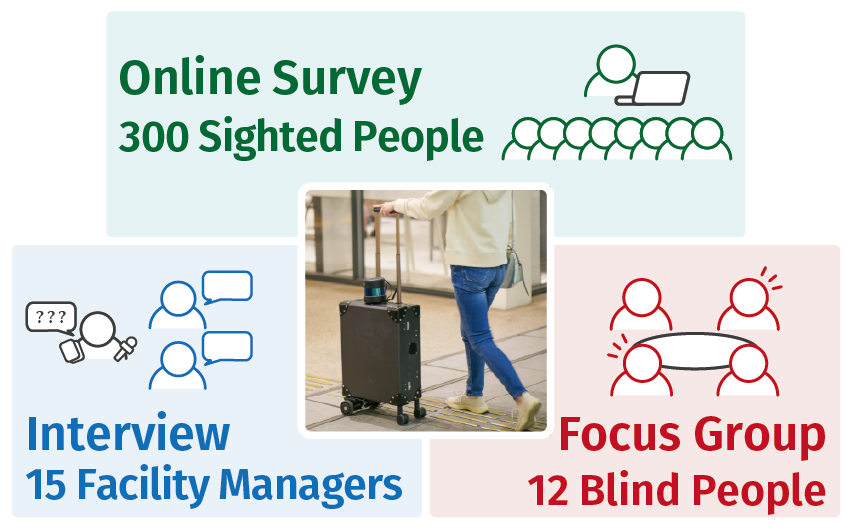
Autonomous navigation robots can increase the independence of blind people but often limit user control—following what is called in Japanese an "omakase" approach where decisions are left to the robot. This research investigates ways to enhance user control in social robot navigation, based on two studies conducted with blind participants. The first study, involving structured interviews (N=14), identified crowded spaces as key areas with significant social challenges. The second study (N=13) explored navigation tasks with an autonomous robot in these environments and identified design strategies across different modes of autonomy. Participants preferred an active role, termed the "boss" mode, where they managed crowd interactions, while the "monitor" mode helped them assess the environment, negotiate movements, and interact with the robot. These findings highlight the importance of shared control and user involvement for blind users, offering valuable insights for designing future social navigation robots.
Presentation Video
Publication
Rie Kamikubo, Seita Kayukawa, Yuka Kaniwa, Allan Wang, Hernisa Kacorri, Hironobu Takagi, and Chieko Asakawa.
2025.
Beyond Omakase: Designing Shared Control for Navigation Robots with Blind People.
In Proceedings of the 2025 CHI Conference on Human Factors in Computing Systems (CHI 2025).
Authors
College of Information University of Maryland
IBM Research
Related Projects

CHI 2025 Case Study


Other Links



Acknowledgements
We thank the participants in our study as well as the anonymous reviewers for their comments that further strengthened this paper. We also like to thank the Miraikan staff, including Hiromi Kurokawa and Takashi Suzuki, for their help in running the studies. Rie Kamikubo and Hernisa Kacorri were supported from the National Institute on Disability, Independent Living, and Rehabilitation Research (NIDILRR), ACL, HHS (grant #90REGE0024).