Snap&Nav:
Smartphone-based Indoor Navigation System For Blind People via Floor Map Analysis and Intersection Detection
Abstract
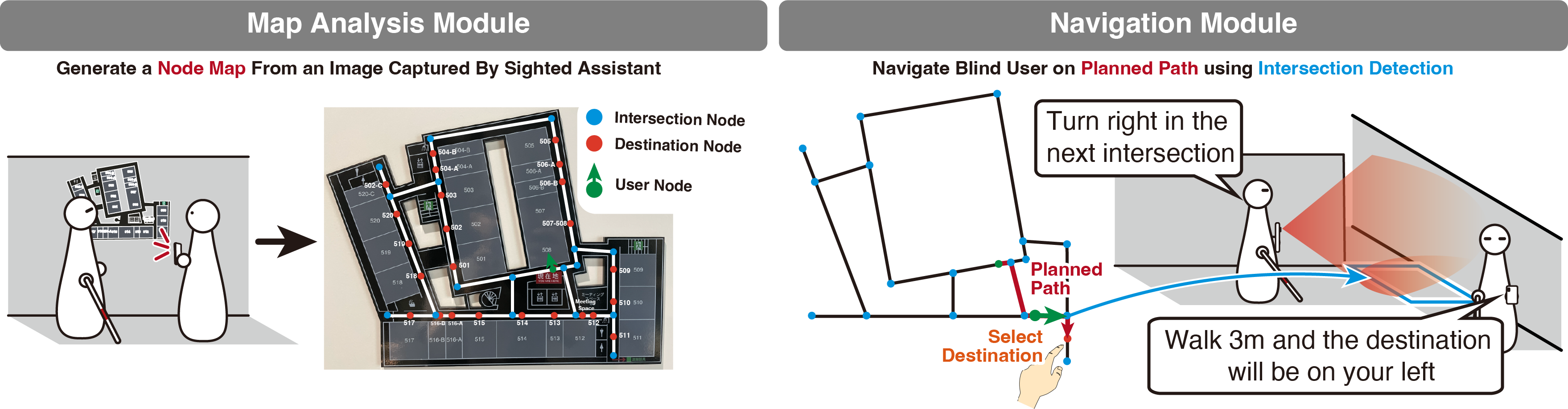
We present Snap&Nav, a navigation system for blind people in unfamiliar buildings, without prebuilt digital maps. Instead, the system utilizes the floor map as its primary information source for route guidance. The system requires a sighted assistant to capture an image of the floor map, which is analyzed to create a node map containing intersections, destinations, and current positions on the floor. The system provides turn-by-turn navigation instructions while tracking users' positions on the node map by detecting intersections. Additionally, the system estimates the scale difference of the node map to provide distance information. Our system was validated through two user studies with 20 sighted and 12 blind participants. Results showed that sighted participants processed floor map images without being accustomed to the system, while blind participants navigated with increased confidence and lower cognitive load compared to the condition using only cane, appreciating the system's potential for use in various buildings.
Preview Video [0:33]
Main Video [2:50]
Publications
Masaya Kubota*, Masaki Kuribayashi*, Seita Kayukawa, Hironobu Takagi, Chieko Asakawa, and Shigeo Morishima (* - equal contribution).
2024.
Snap&Nav: Smartphone-based Indoor Navigation System For Blind People via Floor Map Analysis and Intersection Detection.
In Proceedings of the 26th International Conference on Human-Computer Interaction with Mobile Devices and Services (MobileHCI 2024).
Code

Authors
(* - equal contribution)
Acknowledgements
We would like to thank all the participants who took part in our user study. We would also thank Miraikan - The National Museum of Emerging Science and Innovation for their support. This work was supported by JSPS KAKENHI (JP23KJ2048).
Related Projects
Mapless Navigation for Blind People